|
Robert Ren I'm a MS Robotics student at Carnegie Mellon University working on world models, supervised by Professor Katerina Fragkiadaki. I graduated from the University of Toronto's Engineering Science program, majoring in Robotics with a minor in Machine Intelligence. Previously, I was a research intern at the Toronto Robotics and AI Lab (TRAIL) supervised by Professor Steven Waslander, at the Toronto Intelligent Systems Lab supervised by Professor Igor Gilitschenski, and at FORCOLAB supervised by Professor Shurui Zhou. My current research focuses on world models for robotics and embodied AI. Previously, I have worked on the intersection of Gaussian Splatting and Diffusion Models, exploring how to leverage rich diffusion priors to significantly improve the accuracy and speed of generative reconstructions. I'm always open to collaboration and interesting research discussions—feel free to reach out via email! |

|
ResearchI'm interested in computer vision and generative models. You can find my research projects and papers below. |
 |
Project on Point Cloud World Model
In Progress Details coming soon... |
 |
Project on 3D Gaussian Splatting and Diffusion Moddels
Under Review Details coming soon... |
|
|
AvatarOne: Monocular 3D Human Animation
Akash Karthikeyan, Robert Ren, Yash Kant, Igor Gilitschenski WACV, 2024 Fast and robust solution for both surface modeling and novel-view animation. |
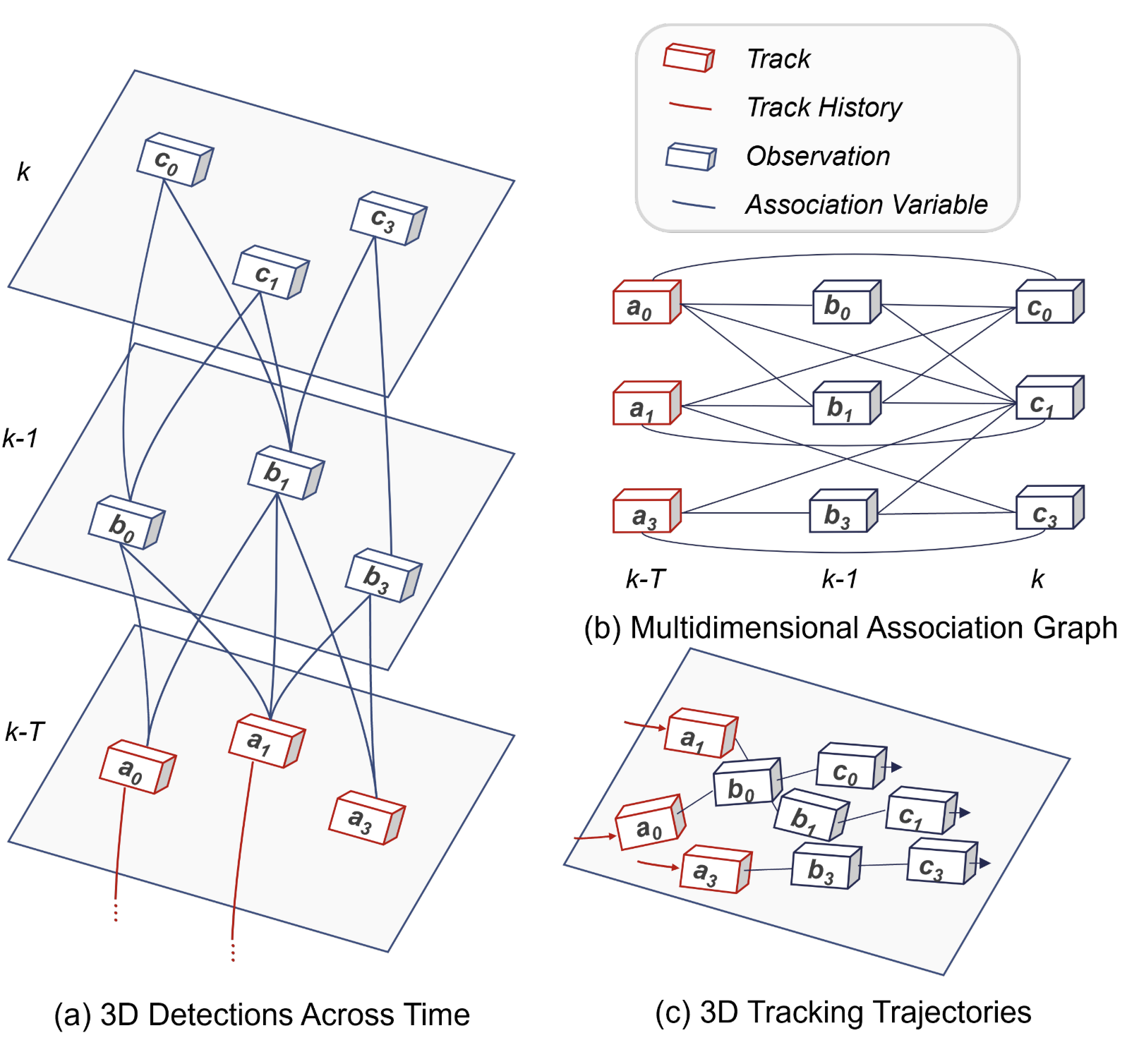 |
SWTrack: Multiple Hypothesis Sliding Window
3D Multi-Object Tracking
Sandro Papais, Robert Ren, Steven Waslander ICRA, 2024 Graph-based optimization method that uses additional temporal information to prevent missed objects and improve the performance of tracking methods, especially when objects are occluded in the current viewpoint. |
Experience |
|
CMU Robotics Institute Graduate Researcher | Aug, 2025 - Present
Working on world models for robotics and embodied AI.
| |
|
Toronto Robotics and AI Laboratory Research Intern | Aug, 2023 - Aug, 2025
Worked on 3D Gaussian Splatting with Diffusion Models and LiDAR-based object tracking.
| |
|
Toronto Intelligent Systems Lab Research Intern | Jan, 2023 - June, 2024
Worked on Neural Radiance Fields (NeRFs) and diffusion models.
| |
 |
FORCOLAB Research Intern | May, 2022 - August, 2022
Researched on the disclosure patterns of OSS vulnerabilities on official vulnerability websites and social media, along with heuristics for predicting undisclosed software vulnerabilities.
|
 |
aUToronto, University of Toronto's autonomous driving team August, 2022 - June, 2025
3D Object Detection Lead | June, 2024 - June, 2025
Developed and deployed real-time LiDAR-based 3D object detection models on autonomous vehicles. Implemented semi-autolabeler to improve data collection and labeling efficiency.
Radar Object Detection Lead | August, 2023 - June, 2024
Integrated radar detections into the perception pipeline to improve object tracking performance and aid perception under adverse weather.
3D Object Detection Developer | August, 2022 - May, 2023
Developed LiDAR-based 3D object detection methods. Placed first in the perception challenge at the SAE autonomous driving competition. |
Education |
|
Carnegie Mellon University, Robotics Institute MS Robotics | 2025 - Present | |
 |
University of Toronto BASc. in Engineering Science | 2020 - 2025 Robotics Major, Machine Intelligence Minor |
|
|